Pickle Robot Company is interested in developing robots for tasks like truck unloading and conveyor sortation. As part of a small team, I worked on the engineering, machine learning, and algorithms required for bootstrapping new applications, as well as improving existing robots in production.
I worked on reinforcement learning applied to deformable object manipulation. Tackled technical as well as engineering challenges in deploying reinforcement learning policies on hardware.
Researched and proposed scene-aware mobile manipulation, for improving efficiency of mobile manipulation tasks. Designed and open sourced several tools for conducting robotics and machine learning research. Briefly also explored dimensionality-reduced reinforcement learning, and machine learning in shared autonomy settings. [M.S Presentation Slides][Mobile manipulation Code] [GazeboGym]
I designed and evaluated off-policy, model-free RL algorithms for steering control of an autonomous vehicle. In a previous, short stint, I also helped design the actuation mechanisms to convert the vehicle (Mahindra Bolero) to a drive-by-wire system.
Projects
Temporally extended actions for Autonomous Overtaking
Independent Work This independent undergraduate research project's aim was to study semi-MDPs; MDPs involving temporally extended actions, and explore their applicability to autonomous driving. I implemented and evaluated several papers in Reinforcement Learning's options framework - a way for temporal abstractions, and built a PyGame simulator for testing the autonomous overtaking task. [Technical Report][Code] (implementation of one of the papers)
Convex Optimization Solver
Independent Work After studying the book 'Convex Optimization' by Boyd and Vandenberghe, I built a solver which uses a Primal Interior Point method for solving differentiable, convex problems. It was faster than specialized solvers like CVX for small-scale problems, since it did not have the same overhead during initialization. [Github Repo]
Autonomous Beach Cleaning Robot
Sridhar Thiagarajan*, Sai Lalitha*, Vishwanath Jeyaraman Designed and developed an autonomous beach cleaning robot to tackle the problem of cleaning India's large coastline in less labor-intensive fashion. I was involved in design and construction of the prototype, the ML pipeline, and I also pitched to acquire funding for this project.
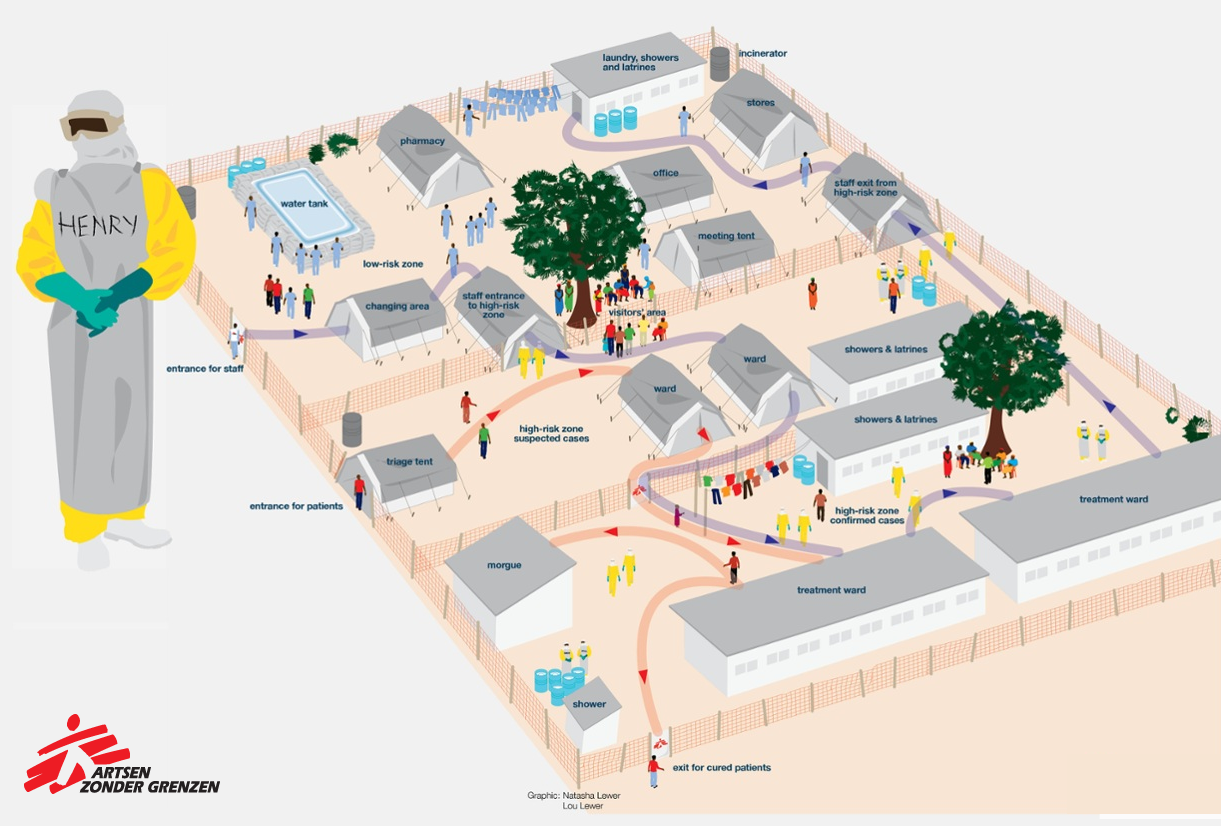
Improving Ebola Camps using Integer Optimization Algorithms
Personal Robotics Lab, Oregon State University Ebola Camps involve limited volunteers in Hazmat suits, and they have a wide variety of prioritized tasks to perform in a limited time horizon.
I worked on formulating this scheduling problem as an Orienteering problem, a problem closely related to the Travelling Salesman Problem (TSP).
We solved them by relaxing them to a sequence of Linear Programs, this being an instance of the more general Branch and Bound algorithm. [Code]